
My family loved the Cherokee Six I used to fly. My daughter, the one most interested in aviation, sat up front with me, helping with radios and charts. My son, whose stomach was the most sensitive, sat in the middle row, near the center of gravity (CG), where turbulence had the least effect. My wife sat in the last row and watched a movie.
Its useful load was large enough to carry a light sport airplane, although the logistics would have been difficult. Big piles of hand-me-downs for the nieces? Load ‘em up! It was difficult to get it out of the published CG envelope.
I hated it.
Well, I didn’t really hate it, because it was an airplane, and it’s almost impossible to hate an airplane. But it took a lot of work to fly it. The outboard tanks at the end of each wing meant managing fuel took a lot of attention. They were so far from the CG that a small imbalance meant a strong wing-low tendency. My protocol involved switching tanks every 15 minutes until the tip tanks were empty.
It was easy to fly when I was alone, but with the family aboard, it was a lot less pleasant. The pitch trim seemed less effective, and holding altitude even in light turbulence was a chore. “What is wrong with this airplane?” I sometimes asked myself. There was nothing wrong with the airplane. Nor was there anything wrong with the laws of physics. It was the combination that was giving me fits.
STABILITY
Perhaps as a direct result of its loading flexibility, the culprit with the Six was stability. Static stability means the airplane moves back toward equilibrium when disturbed. You saw this on one of your first flight lessons. Your instructor had you raise the nose and let go. The nose dropped.
But the nose dropped a little past level before starting to rise. The airplane went through several oscillations, each one hopefully getting smaller, before settling back into level flight. That’s positive dynamic stability. Negative dynamic stability would mean the nose oscillated more and more as time went on. Some people love the term phugoid oscillations and some people hate the term, but in either case you were glad to observe that the airplane had positive static and positive dynamic stability.
Stability is built into the aircraft. The FAA’s Pilot’s Handbook of Aeronautical Knowledge (FAA-H-8083-25B—PHAK) says “the aircraft manufacturer sets the stabilizer at an angle that provides the best stability (or balance) during flight at the design cruising speed and power setting.” That’s nice; we want to fly aircraft with positive static and dynamic stability.
The PHAK does not really describe how stability decreases as the CG moves aft. And that was the problem with the Six: while the CG was within the legal envelope, an aft CG meant less stability. Every late afternoon bump knocked the plane away from its equilibrium, and it was very slow to settle back down. It had positive stability, but just barely. When it climbed, I had to work to make it descend, and vice-versa.
Pilot training materials talk about stability, but I have never been satisfied with their explanations of what makes an airplane stable or unstable. There are equations, of course. They’re suitable for a senior math or engineering major to work with, along with lots of calculus. I’m going to try to explain this without the equations. I’ll only discuss straight-wing conventional airplanes at subsonic speeds: you can learn about canards, sweepback effect or Mach tuck later.
FORCES AND TORQUE
Four forces affect an airplane, lift, thrust, drag and weight. These explain a lot, but they also leave a lot unexplained. The forces make useful snapshots. They explain equilibrium situations, like a constant-airspeed, constant-thrust climb. But no snapshot explains the transitions and maneuvers, which are a big part of the fun of flying.
Every maneuver comes with a safety issue. The problems with Boeing’s 737 MAX began with the need to handle the effects of increasing thrust, what most would consider to be a simple maneuver.
Physics textbooks often assume that forces act on the center of mass of the body involved. This is fine for a block sliding down an inclined plane, but an aircraft is a complicated body. Drag and weight can be treated this way, but thrust and lift happen far from the aircraft’s center of mass.
One “feature” of primary training is that pilots learn about CG in the context of weight and balance calculations. For that discussion, CG is the balance point along the longitudinal axis, that is, between the tip of the nose and tip of the tail. The center of mass differs in that it’s the balance point along all three axes: laterally (from wingtip to wingtip) and vertically (from belly to top of the vertical stabilizer), as well as longitudinally.
The location of the center of mass is important. In the Cherokee Six with only one tip tank empty, the center of mass is closer to the fuller tank, a lateral displacement. A few aircraft, like the Robinson R-22 helicopter, have published lateral limits on the center of mass; you may not fly it if the center of mass is too far to the left or to the right of the centerline.
In some airplanes, like a Lake Amphibian with its engine mounted on a pylon above the fuselage, thrust acts well away from the center of mass; on the Boeing 737 MAX, thrust acts well below the center of mass. These effects influence the size of the tail surfaces.
These situations appear everywhere. For example, the downward-moving blade of a propeller produces more thrust than the upward-moving blade, because they meet the relative wind at different angles of attack. Among airplanes designed in the U.S., the downward-moving blade usually is on the right, and this causes the left-turning tendency often called P-factor.
When a force is applied someplace other than the center of mass, torque develops, also described as a moment. So P-factor produces moment about the vertical (yaw) axis. The distance from where the force is applied to the center of mass is called the arm. You can think of moment as the magnitude of the force times the arm, something with which we should be familiar from weight and balance calculations.
You see torque in the action of the flight controls. The elevator produces a force way back there in the tail. If the center of gravity moves forward, that same force has a longer arm and produces more torque. When the CG/center of mass moves aft, that same force causes less torque.
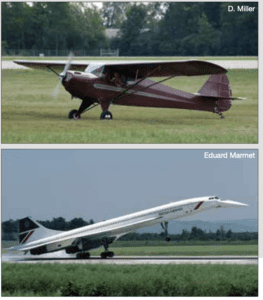
Even if you load the airplane within CG limits, there can still be some nasty surprises. The CG can move during flight, and that means that the stability can change. My old 1946 Taylorcraft BC-12D shared an important trait with Concorde: one can change the CG on both types by moving fuel around. In the case of the Taylorcraft, moving fuel from the wing tank to the header (main) tank moved the CG forward, and the airplane was noticeably more stable.
Concorde was more complicated. It had no trim tabs, because they cause drag. Instead, one trimmed the airplane by moving fuel forward or aft, as required. The trim controls looked pretty conventional, but they were connected to fuel pumps rather than cables or wires.
In some aircraft, fuel burn causes the CG to shift, sometimes quite a bit. In these types, it’s important to estimate a landing CG. I sometimes calculate CG at zero fuel weight (that’s the airplane, the passengers and the baggage or freight), and interpolate to that from the takeoff CG to see how the CG might change.
SUPER STABLE
What is stability? Stability comes into play when there is more than one force. It gets more interesting if the forces act on different parts of the system.
The big example of this is lift. A wing (or other airfoil) generates lift, which does not act through the center of mass. In a high-wing airplane, lift acts above the center of mass; in a low-wing airplane, it acts below. For most GA airplanes, lift acts a little bit behind the center of mass, which causes the nose to pitch down. This moment is counteracted by a downward force from the tail, which causes the nose to pitch up. Similarly, the nose-left tendency from P-factor is counteracted by nose-right torque from right rudder. And so forth. In these situations, the control surfaces, far from the center of mass, do not need to push very hard.
In a steady-state situation, these forces and torques balance and nothing really changes. But aircraft move around, and something is bound to upset that equilibrium: a gust, a control movement, wind shear, wake turbulence, etc. What happens when the equilibrium is destroyed? That’s the topic of stability.
Stability describes, quite precisely if you wish, what happens when equilibrium ends. Stability is such a common phenomenon that physicists have developed a very abstract way of describing it. A ball bearing at the bottom of a bowl is in equilibrium. If you move the ball away from the bottom, it goes back toward the bottom. That’s a stable equilibrium. If the bowl is upside down, moving the ball away from the center leads it to move further from the center. That’s an unstable equilibrium. Static stability refers to the first move that the system makes.
A more useful illustration is to raise the nose a little while flying along: static stability makes the nose start down. This is useful but not quite true: If you pull back hard while above maneuvering speed, the wings might come off. So make it a gentle pull.
You can make a room full of CFIs do a lot of head scratching by asking them why the nose starts back to equilibrium after a gentle pull. My take is this: raising the nose from level flight raises the wing’s angle of attack. That increases lift, which increases the nose-down moment. This also changes the angle of attack of the horizontal stabilizer (or equivalent), but this generates a different amount of torque. It’s a delicate situation. Too much tail down force prevents the nose from dropping, too little lets the nose continue to rise.
Trim has an effect, too: after a small disturbance, the airplane tries to go back to its trimmed condition.
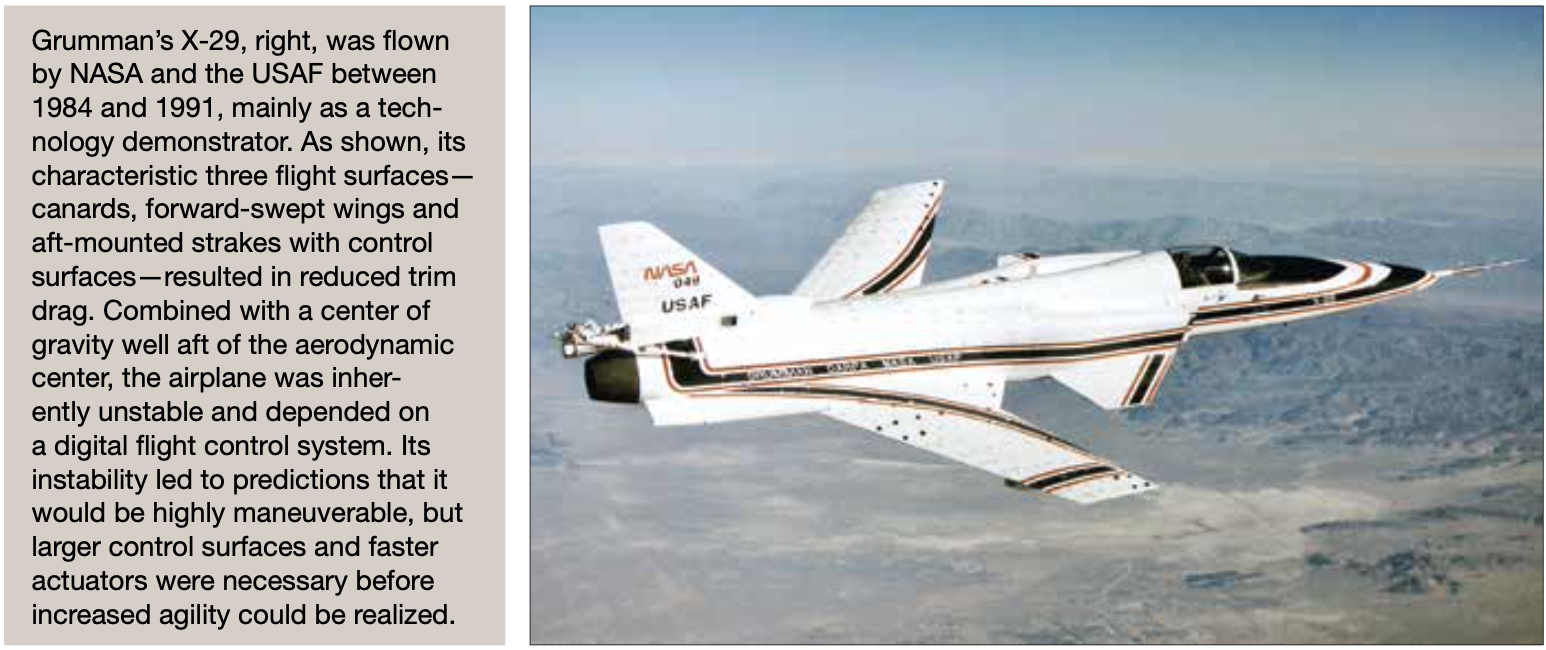
How to build the tail to make this happen is the designer’s job, not the pilot’s. Some designers take this to extremes. The Grumman X-29 (see page 7) used software manipulation of the flight controls rather than mechanical stability. That made it more efficient, but only two were built. Other airplanes are built to be less stable and use a fly-by-wire system to keep the airplane pointed in the right direction.
What the pilot can control is the CG. A control surface always produces the same force when moved the same amount at the same airspeed. But the torque generated also depends on the arm, that is, the distance from the CG. If you move the CG toward the tail, then the tail generates less torque when you pull.
Stability and instability affect aircraft in other ways. Atmospheric instability is a big problem. This has nothing to do with turbulence, although it is tempting to assume so. Atmospheric stability is the vertical equivalent of longitudinal stability: air that starts to rise might continue to rise, or it can return to equilibrium. Stable air stops rising, while unstable air keeps rising.
Rising air is one of the three ingredients for thunderstorms forming, the other two being moisture and a source of lift. Moist air crossing a mountain range will be pushed upward by the terrain; if the air is unstable it will keep rising. Boom!
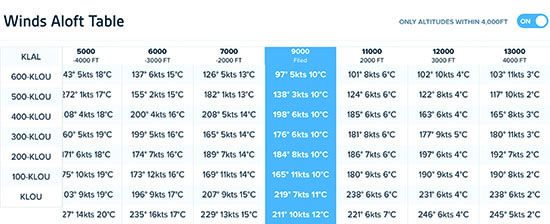
Atmospheric instability is actually easy to measure. The measurement is based on lapse rate, the drop in temperature as altitude goes up. The textbooks say that a drop of four degrees C per thousand feet means unstable air, but my experience is that three degrees C per thousand feet can be unstable enough to cause thunderstorms to form. Temperatures aloft should be part of a preflight weather briefing so you can judge for yourself how likely storms might be.
DYNAMIC STABILITY
While static stability describes the airplane’s first move after it is pushed out of equilibrium, dynamic stability describes the long-term trend. This is described nicely in Greg Lewis’ article “Dynamic Stability,” originally published in the April 2005 issue of Aviation Safety. But we still haven’t gotten to the delicate question of “why?” What happens when the CG is further aft?
Look forward first. It’s easier to see the effect of a forward CG. The wing’s nose-down moment is the product of a big force and a small arm. The tail’s nose-up moment is the product of a big arm and a small force. A small movement forward has a big effect on the nose-down moment because the force is so big. That movement requires a surprisingly large change in the nose-up force required from the tail, because the change in arm is relatively small. As the CG moves forward, more and more force is required from the tail and, if the CG moves forward enough, the tail stalls. That helps define the forward CG limit.
Going the other way is a little trickier. If the CG is as far aft as the center of lift then there will be no nose-down moment from the wing. But there will still be nose up moment from the tail. That’s tricky. There won’t be any balancing force to fix whatever you do to the tail by using the yoke. That’s an unstable situation.
SETTLING DOWN
Aviation is full of trade-offs, and stability is one of them. An aft CG means (slightly) higher speed, but at the cost of reduced stability. An autopilot makes it easier to correct for these situations, but it adds weight and complexity to the airplane. For autopilot or human pilot, if the situation is bad enough, the control surfaces might reach the point of full deflection. Once the surfaces are fully deflected there is no more aerodynamic authority to correct things.
You can prevent all of these problems by loading the airplane properly. Just keep in mind that if the hand-me-downs for the nieces mean that you are loaded at the aftmost CG, the flight will be a lot more work.
Jim Wolper is an airline transport pilot and mathematics professor. He’s also a CFI with single-engine, multi-engine, instrument and glider ratings.


