
Autopilots are a fabulous workload management tool. In a busy, single-pilot cockpit they quite literally can be a lifesaver. Weve come to accept their precision and dependability. Theres a growing viewpoint that a functioning autopilot is an essential requirement for all instrument flight-many pilots I know say they would not contemplate IFR without an autopilot. So consider this scenario: You are cruising above a solid cloud deck, with IMC below and the need to fly an instrument approach. The autopilot fails. Would you 288 declare an emergency? Would you divert to a VMC airport? In other words, if you feel a functioning autopilot is required for IFR, where does that put you when the autopilot dies? Its a serious question: Should the Federal Air Regulations require an autopilot? Most Part 135 operations must have a working autopilot for IFR flight, or else carry a two-pilot crew. To answer this question for Part 91 ops we need to look at the pros and cons of autopilots…including how reliable they really are, and what effect autopilot use might have on a pilot. Autopilots 1, 2, 3 Autopilots come in three basic forms: Single-axis autopilot: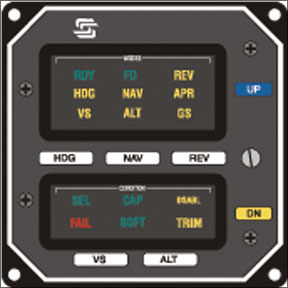
Two-axis autopilot.
A two-axis autopilot adds pitch control that can hold attitude, altitude, heading and navigation (including, in some, approach modes). Some pilots mistakenly call these “three-axis” autopilots because with pitch and bank control the autopilot can control flight in everything but yaw…and airplane stability (not to mention pilot complacency) makes yaw control an afterthought to many. Most general aviation autopilots today are two-axis types.Three-axis autopilot:
Add a yaw damper controlling the rudder to a two-axis autopilot and youve automated flight in all three axes. This is very helpful in some airplane types that suffer from Dutch rolling tendency (a sure way to make back-seat passengers queasy) or are loaded toward the aft end of their c.g. envelope. Often a full three-axis system is merely a two-axis autopilot with an optional yaw damper that can be run independently if the pilot wants to inhibit Dutch roll while hand-flying the airplane. Because they resist rudder control its imperative that pilots remember to turn off the yaw damper before landing.Some pilots dont like one-axis autopilots because “you have to watch them all the time.” The reality is that all autopilots require continuous monitoring-theyre there to help, not act as pilot-in-command. As one of my students once said, an autopilot is an extremely capable, extremely stupid copilot. It does precisely whatever you tell it to do, right or wrong. As reliable as most autopilots themselves are, one of the most common reports to NASAs Aviation Safety Reporting System is an altitude bust because the pilot mis-programmed the autopilot.
system Types
Autopilots are driven in one of two ways: a rate-based system, or one that is attitude-based. A rate-based autopilot senses wing leveling through a turn
288
coordinator-the rate of turn. If it senses a turn through the indicator, it corrects as needed. If a turn is commanded, the rate-based system aims for a predetermined rate of turn on the turn coordinator, usually standard-rate or half standard-rate.
Common rate-based autopilots include the Honeywell KAP140 and the S-Tec line. “Glass-cockpit” airplanes that include a rate-based autopilot may have a turn coordinator hidden behind the panel, out of the pilots view, that drives the autopilot.
Advantages of the rate-based autopilot: It is generally less expensive than attitude-based types. If the airplanes attitude indicator fails and leaves the pilot flying partial panel, a turn coordinator-driven autopilot can be a lifesaver. If the pilot gets into an unusual attitude the turn coordinator wont as readily tumble, so the sensing system is still reliable if the pilot recovers and then engages the autopilot. Disadvantages: Rate-based autopilots arent as sensitive as attitude-based systems, so they may “hunt” a little more to remain on a navigation signal. Lose the turn coordinator and the autopilot also fails-if the turn coordinator is hidden in a glass-cockpit airplane, the pilot cant check this during taxi.
Attitude- or position-based autopilots reference the primary attitude indicator, and may also read the heading indicator of an HSI. In turns, attitude-based autopilots generally command a specific bank angle regardless of aircraft speed. Common attitude-based autopilots include the Honeywell KFC150 and 200, and most Century autopilots.
Advantages of attitude-based autopilots: They are more precise than rate-based systems, and make smaller corrections. Disadvantages: If the attitude indicator (or the HSI, if linked) fails, the autopilot will not work properly and in some installations will disengage (and not reengage).
A third type of autopilot just entering the general aviation market is driven by accelerometers and AHRS (attitude/heading reference system) inputs into a glass cockpit.
Garmins integrated GFC700 is a leading lightplane design in this class. These autopilots are extremely precise-but get “red Xs” on the glass panel and you lose the autopilot also.
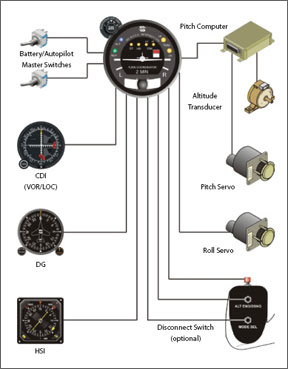
Servos and trim
Autopilots command control surfaces to move though servos, small electric motors that drive trim tabs or the control surfaces themselves. Autopilots can hold a little control force without trimming-thats why the airplane is often a little out of trim, and tends to nose up or down, when you turn off the autopilot-but will disconnect if the force required reaches a design value, or if bank or pitch becomes extreme.
Strong jolts of turbulence can drive the autopilot to exceed these limits trying to resist, and cause the autopilot to disengage. A little structural icing can freeze up a trim tab, causing the autopilot to try to break it loose-making the airplane lurch when the ice does break, or the autopilot to disconnect (while out of trim) when it reaches its maximum control force input.
If a servo motor seizes the autopilot wont function. More commonly, a short develops in a servo motor and it continues to run after the autopilot makes an adjustment (see the sidebar, “Trim Runaway,” on the previous page).
Why concern yourself with the intricacies of what drives your autopilot, or how it controls the airplane? Because autopilots themselves may be very robust, but depending on the type youre flying with they may be rendered inoperative by seemingly independent systems failures like vacuum systems or HSIs, or environmental conditions like turbulence or ice. You can go from everything-working to out-of-trim, partial panel hand-flying in the blink of an eye…maybe just as youre reaching minimum altitude on a coupled instrument approach. Its important to know what will make the autopilot inoperative besides an autopilot failure alone.
Pilot-in-the-loop
In the early 90s I was a simulator instructor at a brand-name training provider, teaching pilots in Beech piston airplanes. One week I had a pilot in class who had phenomenal experience as an Alaskan bush pilot but who had recently moved south and bought an A36 Bonanza. The insurance company mandated he attend the course.
He knew the airplane well-in fact, he was somewhat upset that our “initial” course concentrated on the airplane systems, because unlike most owners he had made a thorough study of the Pilots Operating Handbook and engine manuals. In the simulator, however (actually a Flight Training Device), he had great difficulty in basic aircraft control and workload management.
In his defense, the FTD was difficult to fly at that stage in its development, but I could tell the difference between control difficulty and a pilot who had severely deficient IFR skills. Unfortunately this pilot fell into the latter category.
His response to my coaching and critique was that I was not letting him use the autopilot full-time-that he flew hard IFR in busy airspace, and that he turned the autopilot on immediately after gear retraction and used it exclusively until just before touchdown. This, he explained, made him able to better manage the flight, spreading out the workload in IMC and letting him scan for traffic when clear of the clouds. He felt we should teach “pilot-in-the-loop” flying, i.e., full-time autopilot use with the pilot as a systems manager.
He was so frustrated with our training emphasis on hand-flying (with the autopilot used primarily in distracting situations like briefing for the approach) that he left the program early and did not complete the course. I dont know what effect this had on his insurance, and I could certainly have communicated our stance to him better, but that experience set me thinking about the appropriate use of highly capable autopilots in high-performance, single-pilot airplanes.
Positive rate, autopilot on
In my experience the worst instrument pilots are those who engage the autopilot almost immediately after takeoff, and fly coupled for the entire flight. At the simulator school we called these “gear up, autopilot on” pilots, which Ill now amend to “positive rate, autopilot on” because so many fixed-gear airplanes have highly capable autopilots.
Make one of these pilots hand-fly a straightforward descent, approach setup, approach and missed approach into a hold, and they would almost always reach a point where the workload was too great to meet basic IFR tolerances. Usually we could get the pilot back up to speed in a few hours training. Problem is, if their first recent experience in flying by hand happens in the airplane in IMC, not in a training environment, the opportunity for retraining may be tragically lost.
Im not suggesting we forget the autopilot exists, or that all training be hand-flown with no regard for the labor-saving capabilities of autopilots. Instead, I advocate we approach autopilot use intelligently, and remain prepared to hand-fly if something should cause the autopilot to fail. For instance:
Alternate the way you fly approaches to remain current with fully coupled, flight director (if so equipped) and hand-flown approaches. The less often you fly, the more you should weigh your approaches toward the raw-data hand-flown.
Use the autopilot in situations that demand your attention, such as mixture leaning, setting up for an approach and VMC in busy areas.
Dont assume the autopilot will always perform as expected. Scan the mode controller and the flight instruments every few seconds to make sure alls still going as planned.
When flying an approach to minimums, use the autopilot and monitor it closely. If the autopilot should issue strange commands, excessive rates of descent or unusual intercept angles, turn it off and fly the approach by hand. If youre not immediately comfortable with the result, hand-fly a missed and set up to try again.
Fly all approaches, navigation tracking and holds logged for purposes of instrument currency by hand-dont count them if they are flown by the autopilot.
Practice, in a realistic simulator or in the airplane with a knowledgeable instructor or safety pilot, taking over from the autopilot and recovering the hand-flying the airplane in cruise flight, during an approach, and in a missed approach.
Know all the ways to disengage the autopilot and electric trim.
Include transition from everything-working to partial-panel flight in those “take-over” scenarios.
In airplanes without manual trim systems, practice (in a simulator or with a very careful instructor) hand-flying approaches and missed approaches with the trim set too nose-high or too nose-low, as if recovering from a trim runaway.
Required for IFR?
Should autopilots be required for single-pilot IFR? I think not-history and experience shows an airplane can be flown in IMC without this level of automation, if the pilot is well-trained and does a good job managing workload.
The bigger question is: With high-quality autopilots on board modern single-pilot aircraft, how can pilots maintain the skills necessary to hand-fly the airplane in the event the autopilot disengages?
Until our airplanes have triple-redundant autopilots powered by independent electrical systems and referencing separate attitude or rate indicators, and power multiple trim servos that have the ability to override one another, we have to be ready to hand-fly at any time.
Autopilots are a significant safety addition to the single-pilot cockpit. Most are incredibly reliable. But they cant replace a pilot flying the airplane and there are dozens of failure scenarios.
Keep your skills sharp-focus on hand-flying, partial-panel and workload management-and pick weather based on your ability to safely complete the trip without an autopilot. In other words, never fly anywhere with an autopilot in weather if you cannot immediately take over and recover should it fail. Because it will.



I have a different question. How does one determine the minimum altitudes for autopilot use under part 91? Part 135 is easy.